位置決定/座標付け
空中三角測量でのブロックの調整方法と向きを選択します。
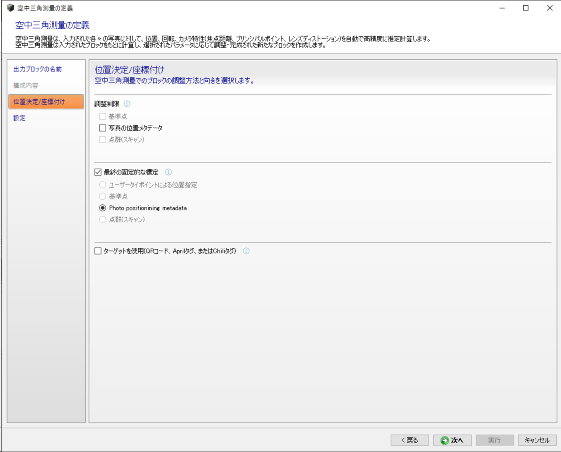
位置決定モードの選択肢は、入力するブロックのプロパティに応じて使用可能になります。
空中三角測量では位置指定を行えますが、この場合、ブロックの位置と方向は任意です。
最終の固定的な標定:
- ユーザータイポイントによる位置指定(入力ブロックに位置指定がある場合にのみ使用可能): ブロックの配置、方向付け、スケールはあらかじめ定義された制約に従って精密に決定されます。
- 固定的な標定のための写真の位置メタデータ(入力ブロックに位置メタデータを持つ写真が少なくとも3つある場合にのみ使用可能):ブロックはポーズメタデータの写真位置に従って精密に標定されます(メタデータが不正確な場合にお勧めします)。
- 基準点(有効な基準点のセットが必要):ロングレンジの幾何形状のディストーションは処理されずに、ブロックは基準点に固定的に標定されます(基準点が不正確な場合にお勧めします)。
- 点群(スキャン)。
ターゲットを使用(QRコード、Aprilタグ、またはChiliタグ)
写真から抽出したターゲットを使用して、位置指定または基準点に従ってブロックを標定できます。現在の測量データも使用されます。
基準点を使用する位置決定モードには、有効な基準点のセットが必要です。基準点は3点以上が必要です。1点につき2枚以上の写真に入れてあることが必要です。
ターゲットの作成の詳細については、「ContextCapture ターゲットクリエイター」 (189ページ)を参照してください。